Udine. All’università e in streaming su Teams il seminario conclusivo del progetto “BENĀCUS – Ricerche storico-archeologiche e prospezioni geofisiche integrate per una mappatura del patrimonio culturale sommerso del lago di Garda” per il recupero di fonti archeologiche inedite da affiancare a quelle storico-archivistiche nella ricostruzione delle vicende della flotta veneziana tra XV e XVI secolo

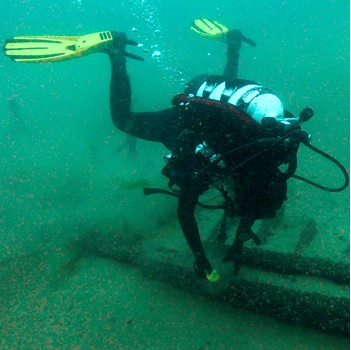
Prospezioni archeologiche subacquee nelle acque del lago di Garda, lungo la sponda veronese (foto uniud)
Martedì 19 ottobre 2021 seminario conclusivo del Progetto di Ricerca Dipartimentale (PRID) “BENĀCUS – Ricerche storico-archeologiche e prospezioni geofisiche integrate per una mappatura del patrimonio culturale sommerso del lago di Garda”. L’evento verrà offerto in modalità ibrida: studenti e personale interno dell’università di Udine potranno assistere in presenza previa prenotazione, mentre il pubblico esterno potrà seguire la diretta trasmessa su Teams. Nato dalla collaborazione tra il dipartimento di Studi umanistici e del Patrimonio culturale dell’università di Udine e il dipartimento di Matematica e Scienze della Terra dell’università di Trieste, e forte dell’accordo con la soprintendenze locali, il progetto PRID “Benacus” ha portato avanti un’analisi autoptica della sponda veronese del lago di Garda per il recupero di fonti archeologiche inedite da affiancare a quelle storico-archivistiche nella ricostruzione delle vicende della flotta veneziana tra XV e XVI secolo. A conclusione delle ricerche, il DIUM organizza il seminario “BENĀCUS – Ricerche storico-archeologiche e prospezioni geofisiche integrate per una mappatura del patrimonio sommerso del lago di Garda”, curato da Massimo Capulli (responsabile scientifico del progetto) e dal prof. Andrea Zannini, in programma per il pomeriggio di martedì 19 ottobre 2021, alle 16, a Palazzo Antonini-Cernazai, Aula 13 (ex 14), in via Petracco 8 a Udine. Interverranno anche Giovanni Falezza e Alessandro Asta in rappresentanza delle soprintendenze Archeologia, Belle arti e Paesaggio per le province di Verona, Rovigo, Vicenza e per l’area metropolitana di Venezia e le province di Belluno, Padova e Treviso.

“BENĀCUS – Ricerche storico-archeologiche e prospezioni geofisiche integrate per una mappatura del patrimonio culturale sommerso del lago di Garda” è un progetto del dipartimento di Studi umanistici e del patrimonio culturale dell’università di Udine in collaborazione con il dipartimento di Matematica e Scienze dell’università di Trieste (referente prof. Michele Pipan) e il dipartimento di Ingegneria industriale dell’università di Firenze (referente prof. Benedetto Allotta), ed in accordo con la soprintendenza Archeologia, Belle arti e Paesaggio per le province di Verona, Rovigo e Vicenza. L’obiettivo principale è di condurre una ricerca interdisciplinare che abbia per oggetto la sponda veronese del lago di Garda, finalizzata in primis alla ricostruzione storico-archeologica delle vicende connesse alla flotta della Serenissima nel periodo compreso tra la guerra veneto-viscontea e quella di Cambrai. La ricerca e la mappatura si avvalgono di una metodica interdisciplinare che prevede la raccolta e analisi delle fonti storico-archivistiche, lo spoglio dell’inedito archeologico disponibile presso gli uffici della Soprintendenza e l’organizzazione di campagne di prospezione strumentale. Queste ultime si basano sull’uso combinato di AUV (Autonomous Underwater Vehicle) e sistemi acustici, quali il Side Scan Sonar e il Sub Bottom Profiler, elettrici ERT (Electrical Resistivity Tomography) ed elettromagnetici GPR (Ground Penetrating Radar). La validazione finale del carattere archeologico delle segnalazioni/anomalie esito delle campagne di prospezione strumentale è affidata ad analisi autoptica da parte di archeologi subacquei fino ad una profondità massima di 50 metri, mentre per i siti più profondi ci si avvarrà di ROV, in questo caso dotati di fotocamere professionali e manipolatori che consentono in remoto di produrre una prima documentazione e prelevare eventuali campioni. Quest’attività farà sì che per ogni zona oggetto di indagine saranno disponibili le seguenti informazioni: coordinate precise di ciascun sito; documentazione video–fotografica; dimensioni e possibile datazione.
Archeologia subacquea, missione in Israele dei robot italiani classe Tifone alla ricerca di tesori sommersi

L’antennina del robot subacqueo classe Tifone in azione in mare alla ricerca di tesori sommersi
Se entro il 1. luglio vi capita di navigare o balneare lungo le coste israeliane tra Cesarea e Akko, e per caso notate un’antennina che affiora tra le spume del mare e si muove in modo sospetto, tranquilli: non si tratta di qualche operazione segreta nelle acque territoriali di Israele né vi trovate nel bel mezzo del set di un nuovo film di James Bond mentre sta provando una delle sue nuove diavolerie tecnologiche. No, niente di tutto questo. Ma state assistendo in diretta a una missione archeologica alla ricerca di tesori sommersi e, più prosaicamente, per documentare i siti di interesse per l’Israel Antiquities Authority. Protagonisti della missione sono due robot subacquei autonomi, progettati dal dipartimento di Ingegneria industriale con la collaborazione del Centro “Enrico Piaggio” dell’Università di Pisa e un robot filoguidato, realizzato in collaborazione con il dipartimento di Scienza della Terra. Responsabile del progetto è Benedetto Allotta, ordinario di Meccanica applicata alle macchine, che dal 17 giugno al 1° luglio coordina le indagini in Israele. Nei fondali antistanti le coste israeliane si trovano infatti relitti di tutte le epoche e i resti un villaggio neolitico (Atlit Yam) sommerso in seguito alla fine delle glaciazioni. La missione archeologica israeliano-americana che si occupa delle indagini ha chiesto la collaborazione del team di ricercatori fiorentini, coordinato da Benedetto Allotta, con la sua flotta di veicoli sottomarini. I Tifoni e Nemo aiuteranno gli archeologi nel lavoro di scoperta di nuovi relitti e reperti sommersi, di documentazione dei siti scoperti e pianificazione dei nuovi lavori da effettuare.

I due robot subacquei: il TifOne e il TifTu, le cui operazioni sono coordinati dal prof. Allotta
I due Tifoni – realizzati nell’ambito del progetto regionale “Thesaurus”, attivo da marzo 2011 ad agosto 2013 – hanno una lunghezza di 3,7 metri, un peso di 170 chilogrammi, e possono superare i 5 nodi di velocità con un’autonomia di 8 ore. TifTu naviga in superficie con l’antenna emersa, è localizzabile grazie al segnale Gps e può localizzare a sua volta TifOne, che naviga in immersione. Il progetto “Thesaurus”, acronimo per “Tecniche per l’Esplorazione Sottomarina Archeologica mediante l’Utilizzo di Robot autonomi in Sciami”, ha per obiettivo rilevare, censire e monitorare a costi contenuti siti archeologici sottomarini, relitti e reperti isolati sommersi, fino a trecento metri di profondità. “Volevamo sviluppare veicoli che dessero la possibilità di effettuare ricognizioni a basso costo (e con minor rischio rispetto all’uso di subacquei professionali)”, spiga Allotta, “su ampi tratti di fondale marino e di ritornare periodicamente su siti precedentemente individuati per verificarne lo stato o riprendere i lavori di ricognizione e classificazione. A livello ingegneristico, l’obiettivo era quello di realizzare veicoli intelligenti che, mutuando tecnologie già sviluppate in campo militare e nel settore della ricerca petrolifera, riuscissero a fornire agli archeologi e agli scienziati interessati all’ambiente marino, come geologi, biologi, etc., strumenti dal costo relativamente contenuto e di facile utilizzo”.

Il team di ricercatori fiorentini coordinato dal prof. Benedetto Allotta, al lavoro in Israele
TifOne – il primo dei veicoli che abbiamo realizzato, continua Allotta – e TifTu sono due Autonomous Underwater Vehicle della classe “Tifone”, nome scherzosamente preso a prestito dal libro di Tom Clancy “La grande fuga dell’Ottobre Rosso”. “Li abbiamo realizzati nell’ambito del progetto regionale “Thesaurus”, in collaborazione – oltre che con il Centro Piaggio dell’Università di Pisa – anche con l’Istituto di Scienza e Tecnologie dell’Informazione – CNR di Pisa e la Scuola Normale Superiore. I veicoli della classe Tifone, hanno una lunghezza di 3,7 metri, un peso di 170 chilogrammi, e possono superare i 5 nodi di velocità con un’autonomia di 8 ore. TifTu è identico a TifOne dal punto di vista naval-meccanico, ma è equipaggiato con sensori e apparati diversi in quanto nella diade ognuno dei due robot ha un ruolo specifico”. Della flotta fa parte anche un piccolo robot filoguidato (ROV = Remotely Operated Vehicle) denominato Nemo, realizzato da Dipartimenti di Scienze della Terra e di Ingegneria industriale nell’ambito di una collaborazione di UNIFI con la Protezione Civile per l’emergenza Costa Concordia. Essendo collegato alla superficie con un cavo di comunicazione ad alta velocità, Nemo – che ha dato luogo a due richieste di brevetto internazionale attualmente in fase di valutazione – consente all’archeologo di essere “presente” sulla scena, guidando il robot con un joystick”.

Molti i relitti e i tesori sommersi presenti nelle acque davanti ad Akko, la vecchia San Giovanni d’Acri

I ricercatori e i tecnici con TifOne all’opera nelle acque antistanti Israele
Dalla metà degli anni Ottanta del secolo scorso le coste Israeliane tra Caesarea e Akko (la vecchia San Giovanni d’Acri o semplicemente Acri) sono oggetto di indagine archeologica perché vi si trovano relitti di tutte le epoche e i resti un villaggio neolitico (Atlit Yam) sommerso in seguito alla fine delle glaciazioni. Un team israeliano-americano, che comprende archeologi delle Università del Rhode Island e di Luisville, sta lavorando nella zona e ha chiesto la partecipazione dell’Università di Firenze che ha contribuito con 7 ricercatori, con i suoi due Tifoni e con Nemo. “TifTu – ricorda il coordinatore del team fiorentino – naviga in superficie con l’antenna emersa e sarà localizzabile grazie al segnale GPS. TifTu ha a bordo uno strumento acustico denominato USBL che gli permette di localizzare TifOne, che naviga in immersione. I due veicoli possono scambiare informazioni tramite strumenti di comunicazione chiamati modem acustici. TifOne ha a bordo i sensori (payload) che acquisiscono i dati di interesse archeologico, ovvero due telecamere e un sonar a scansione laterale (SSS = Side-Scan Sonar). Ha inoltre un sistema di navigazione accurato che consente di “sbagliare poco” nella propria localizzazione anche se non riemerge da molto tempo e non riceve i dati di localizzazione forniti da TifTu. Le immagini georeferenziate – conclude – serviranno a effettuare una ricostruzione tridimensionale dei siti in cui si potrà navigare virtualmente come in un videogioco”.

Commenti recenti